

Ένα από τα μεγαλύτερα εμπόδια με τη διδασκαλία νέων δεξιοτήτων στα
ρομπότ
είναι ο τρόπος μετατροπής πολύπλοκων δεδομένων υψηλών διαστάσεων, όπως εικόνες από ενσωματωμένες κάμερες RGB, σε ενέργειες που επιτυγχάνουν συγκεκριμένους στόχους. Οι υπάρχουσες μέθοδοι βασίζονται συνήθως σε τρισδιάστατες αναπαραστάσεις που απαιτούν ακριβείς πληροφορίες βάθους ή χρησιμοποιώντας ιεραρχικές προβλέψεις που συνεργάζονται με σχεδιαστές κίνησης ή ξεχωριστές πολιτικές.
Ερευνητές του Imperial College του Λονδίνου και του Dyson Robot Learning Lab αποκάλυψαν μια νέα προσέγγιση που θα μπορούσε να αντιμετωπίσει αυτό το πρόβλημα. Η μέθοδος «Render and Diffuse» (R&D) στοχεύει να γεφυρώσει το χάσμα μεταξύ των υψηλών διαστάσεων παρατηρήσεων και των ρομποτικών ενεργειών χαμηλού επιπέδου, ειδικά όταν τα δεδομένα είναι σπάνια.
Ε&Α, αναλυτικά σε έγγραφο που δημοσιεύτηκε για το
Διακομιστής προεκτύπωσης arXiv
, αντιμετωπίζει το πρόβλημα χρησιμοποιώντας εικονικές αποδόσεις ενός τρισδιάστατου
μοντέλο
υ του ρομπότ. Αντιπροσωπεύοντας δράσεις χαμηλού επιπέδου εντός του χώρου παρατήρησης, οι ερευνητές μπόρεσαν να απλοποιήσουν τη διαδικασία μάθησης.
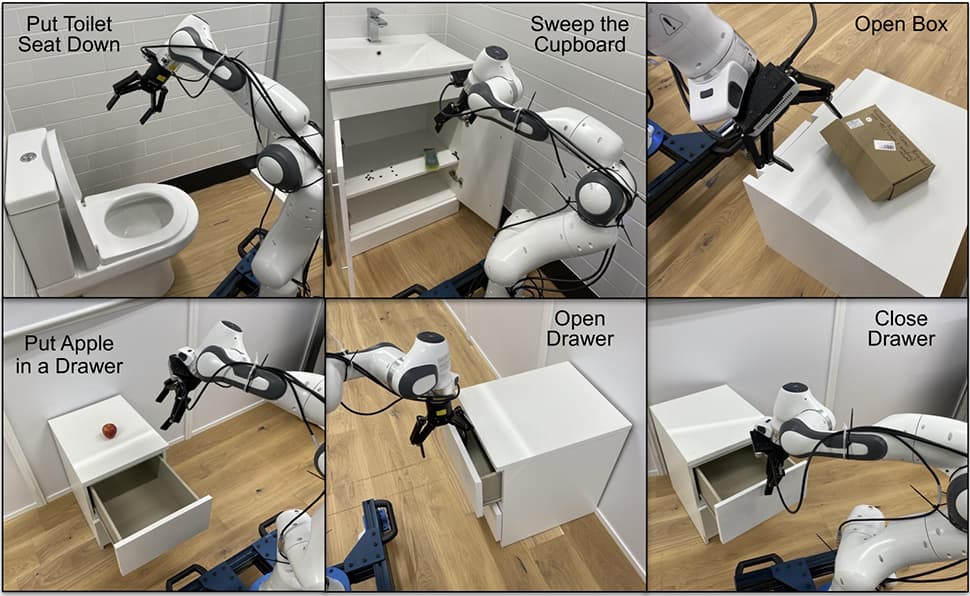
(Εικόνα: Vosylius et al)
Φαντάζονται τις πράξεις τους μέσα σε μια εικόνα
Μία από τις οπτικοποιήσεις στις οποίες οι ερευνητές εφάρμοσαν την τεχνική ήταν να βάλουν τα ρομπότ να κάνουν κάτι που οι άνθρωποι θεωρούν αδύνατο -τουλάχιστον σύμφωνα με τις γυναίκες- να βάλουν ένα κάθισμα τουαλέτας. Η πρόκληση είναι να κάνετε μια παρατήρηση υψηλών διαστάσεων (βλέποντας το κάθισμα της τουαλέτας είναι επάνω) και να το συνδυάσετε με μια ρομποτική δράση χαμηλού επιπέδου (κάθισμα του καθίσματος).
TechXplor
εξηγεί, «Σε αντίθεση με τα περισσότερα ρομποτικά συστήματα, ενώ μαθαίνουν νέες χειρωνακτικές δεξιότητες, οι άνθρωποι δεν κάνουν εκτενείς υπολογισμούς για να καθορίσουν πόσο πρέπει να κινήσουν τα άκρα τους. Αντίθετα, συνήθως προσπαθούν να φανταστούν πώς πρέπει να κινηθούν τα χέρια τους για να αντιμετωπίσουν αποτελεσματικά μια συγκεκριμένη εργασία».
Βιτάλης Βοσύλιος, τελευταίος χρόνος Ph.D. φοιτητής στο Imperial College του Λονδίνου και επικεφαλής συγγραφέας της εργασίας είπε: “Η μέθοδός μας, Render and Diffuse, επιτρέπει στα ρομπότ να κάνουν κάτι παρόμοιο: “φανταστείτε” τις ενέργειές τους μέσα στην εικόνα χρησιμοποιώντας εικονικές αποδόσεις της δικής τους ενσάρκωσης. καθώς οι εικόνες RGB μας δίνουν τη δυνατότητα να διδάξουμε στα ρομπότ διάφορες εργασίες με λιγότερες επιδείξεις και να το κάνουμε με βελτιωμένες δυνατότητες χωρικής γενίκευσης».
Ένα βασικό συστατικό της Ε&Α είναι η μαθημένη διαδικασία διάχυσης. Αυτό βελτιώνει επαναληπτικά τις εικονικές αποδόσεις, ενημερώνοντας τη διαμόρφωση του ρομπότ έως ότου οι ενέργειες ευθυγραμμιστούν στενά με τα δεδομένα εκπαίδευσης.
Οι ερευνητές διεξήγαγαν εκτενείς αξιολογήσεις, δοκιμάζοντας διάφορες παραλλαγές Ε&Α σε προσομοιωμένα
περιβάλλον
τα και σε έξι πραγματικές εργασίες, όπως αφαίρεση καπακιού από μια κατσαρόλα, τοποθέτηση τηλεφώνου σε βάση φόρτισης, άνοιγμα ενός κουτιού και ολίσθηση ενός μπλοκ σε έναν στόχο. Τα αποτελέσματα ήταν ελπιδοφόρα και καθώς προχωρά η
έρευνα
, αυτή η προσέγγιση θα μπορούσε να γίνει ακρογωνιαίος λίθος στην ανάπτυξη εξυπνότερων, πιο προσαρμόσιμων ρομπότ για καθημερινές εργασίες.
«Η ικανότητα αναπαράστασης ενεργειών ρομπότ μέσα σε εικόνες ανοίγει συναρπαστικές δυνατότητες για μελλοντική έρευνα», είπε ο Vosylius. “Είμαι ιδιαίτερα ενθουσιασμένος για το συνδυασμό αυτής της προσέγγισης με ισχυρά μοντέλα θεμελίωσης εικόνας που έχουν εκπαιδευτεί σε τεράστια δεδομένα στο Διαδίκτυο. Αυτό θα μπορούσε να επιτρέψει στα ρομπότ να αξιοποιήσουν τη γενική γνώση που καταγράφουν αυτά τα μοντέλα, ενώ θα μπορούν να συλλογίζονται για ενέργειες ρομπότ χαμηλού επιπέδου.”
(Εικόνα: Vosylius et al.)
VIA:
TechRadar.com/
0